تاریخ:
الگوریتمی که رباتها را حیوان میکند

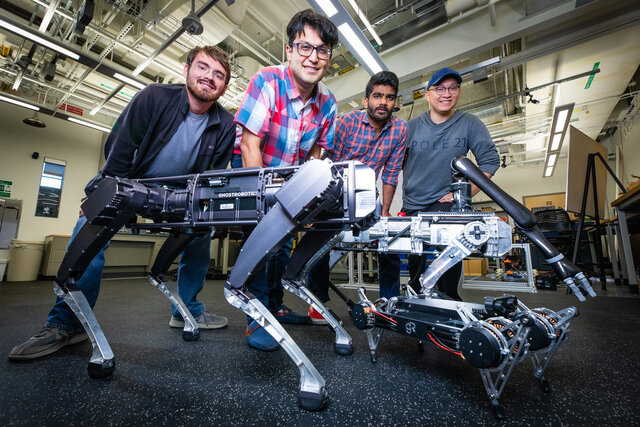
مهندسان موسسه "ویرجینیا تک" الگوریتمی توسعه دادهاند که به رباتهای حیواننما کمک میکند مانند حیوانات واقعی عمل کنند.
به گزارش ایسنا و به نقل از انگجت، سگهای رباتیک میتوانند به خوبی حرکت کنند، اما حرکت طبیعی مانند سگهای واقعی چیز دیگری است. محققان موسسه "ویرجینیا تک" (Virginia Tech) فکر میکنند که میتوانند پیشرفت چشمگیری در این موضوع ایجاد کنند.
آنها در حال ایجاد ترکیبی از الگوریتمها و حسگرها هستند که به رباتها کمک میکند بیشتر شبیه به حیوانات واقعی حرکت کنند.
این سیستم از رفتار مهرهداران تقلید میکند که کنترل تعادل آنها تا حد زیادی ناشی از نورونهای نوسان کننده در نخاع است. این سیستم با استفاده از ترکیبی از حسگرهای رمزگذار (برای خواندن موقعیتهای نسبی مفاصل) و واحدهای اندازهگیری (برای اندازه گیری و ردیابی جهتگیری بدن نسبت به زمین) این کار را انجام میدهد.
نتیجه یک سگ مکانیکی است که میتواند با لطافت و سرعتی بیشتر از حد معمول راه برود و بدود.
دوربینها و سیستم لیدار (LiDAR) نیز برای کمک به رباتها در جلوگیری از برخورد حضوری فعال دارند. حداقل این ویژگی نیاز به ایجاد تغییرات چشمگیری در رباتها ندارد.
نمونه اولیه این سیستم مورد آزمایش قرار گرفته و کارایی آن اثبات شده، اما قبل از اینکه بتوان این رباتها را در فضای فراتر از آزمایشگاه مشاهده کرد کارهای زیادی باقی مانده است.
"کاول حامد" استادیار و محقق اصلی این پروژه تأکید کرد که مسئله فقط مؤثرتر کردن الگوریتمها نیست، چرا که باید الهام بخش زیستی داشته باشند. بدین ترتیب میتوان در آینده نزدیک یک ربات-حیوان خانگی داشت که به راحتی و واقعی حرکت میکند.
به گزارش ایسنا و به نقل از انگجت، سگهای رباتیک میتوانند به خوبی حرکت کنند، اما حرکت طبیعی مانند سگهای واقعی چیز دیگری است. محققان موسسه "ویرجینیا تک" (Virginia Tech) فکر میکنند که میتوانند پیشرفت چشمگیری در این موضوع ایجاد کنند.
آنها در حال ایجاد ترکیبی از الگوریتمها و حسگرها هستند که به رباتها کمک میکند بیشتر شبیه به حیوانات واقعی حرکت کنند.
این سیستم از رفتار مهرهداران تقلید میکند که کنترل تعادل آنها تا حد زیادی ناشی از نورونهای نوسان کننده در نخاع است. این سیستم با استفاده از ترکیبی از حسگرهای رمزگذار (برای خواندن موقعیتهای نسبی مفاصل) و واحدهای اندازهگیری (برای اندازه گیری و ردیابی جهتگیری بدن نسبت به زمین) این کار را انجام میدهد.
نتیجه یک سگ مکانیکی است که میتواند با لطافت و سرعتی بیشتر از حد معمول راه برود و بدود.
دوربینها و سیستم لیدار (LiDAR) نیز برای کمک به رباتها در جلوگیری از برخورد حضوری فعال دارند. حداقل این ویژگی نیاز به ایجاد تغییرات چشمگیری در رباتها ندارد.
نمونه اولیه این سیستم مورد آزمایش قرار گرفته و کارایی آن اثبات شده، اما قبل از اینکه بتوان این رباتها را در فضای فراتر از آزمایشگاه مشاهده کرد کارهای زیادی باقی مانده است.
"کاول حامد" استادیار و محقق اصلی این پروژه تأکید کرد که مسئله فقط مؤثرتر کردن الگوریتمها نیست، چرا که باید الهام بخش زیستی داشته باشند. بدین ترتیب میتوان در آینده نزدیک یک ربات-حیوان خانگی داشت که به راحتی و واقعی حرکت میکند.


لینک کوتاه: کپی لینک

وداعی که جهان روایت کرد وداع تلخ اسطوره؛ پایان عصر رونالدو در جام جهانی اعلام آخرین وضعیت مراسم و محل تدفین رهبر شهید در حرم رضوی نشست ناتو در سایه نارضایتی ترامپ سخنگوی وزارت دفاع: ایران مسیر دیپلماسی را دنبال میکند و به هر تجاوزی پاسخ قاطع میدهد دبیرکل ناتو: در آستانه انقلاب صنعتی دفاعی فراآتلانتیک هستیم بازگشایی فرودگاه بوشهر پس از چهار ماه وقفه تعطیلی سراسری روز چهارشنبه در عراق همزمان با تشییع رهبر شهید جزئیات تعطیلی ادارات مازندران در ۱۸ تیرماه وقوع یک حادثه دریایی نزدیک تنگه هرمز جزئیات فعالیت ادارات و مدارس مشهد در روز چهارشنبه ادعای ترامپ: ما به تنگه هرمز نیازی نداریم ترافیک سنگین در محورهای مواصلاتی اصفهان عذرخواهی دکتر سریع القلم از پدر و مادرش بابت مطالب کذب برنامه «جریان» و قدردانی از مردم وقتی "خشم حماسی" بومرنگ برگشتی شد!/ ترامپ و شگفتی از اندوه انبوه جمعیت در مراسم تشییع